Coordinates¶
Generate, store, and manipulate points in 3D coordinate systems.
The core of this module is the Coordinates class. It can convert
between coordinate conventions and rotate, query and plot coordinates points.
Functions for converting coordinates not stored in a Coordinates
object are available for convenience. However, it is strongly recommended to
use the:py:func:Coordinates class for all conversions.
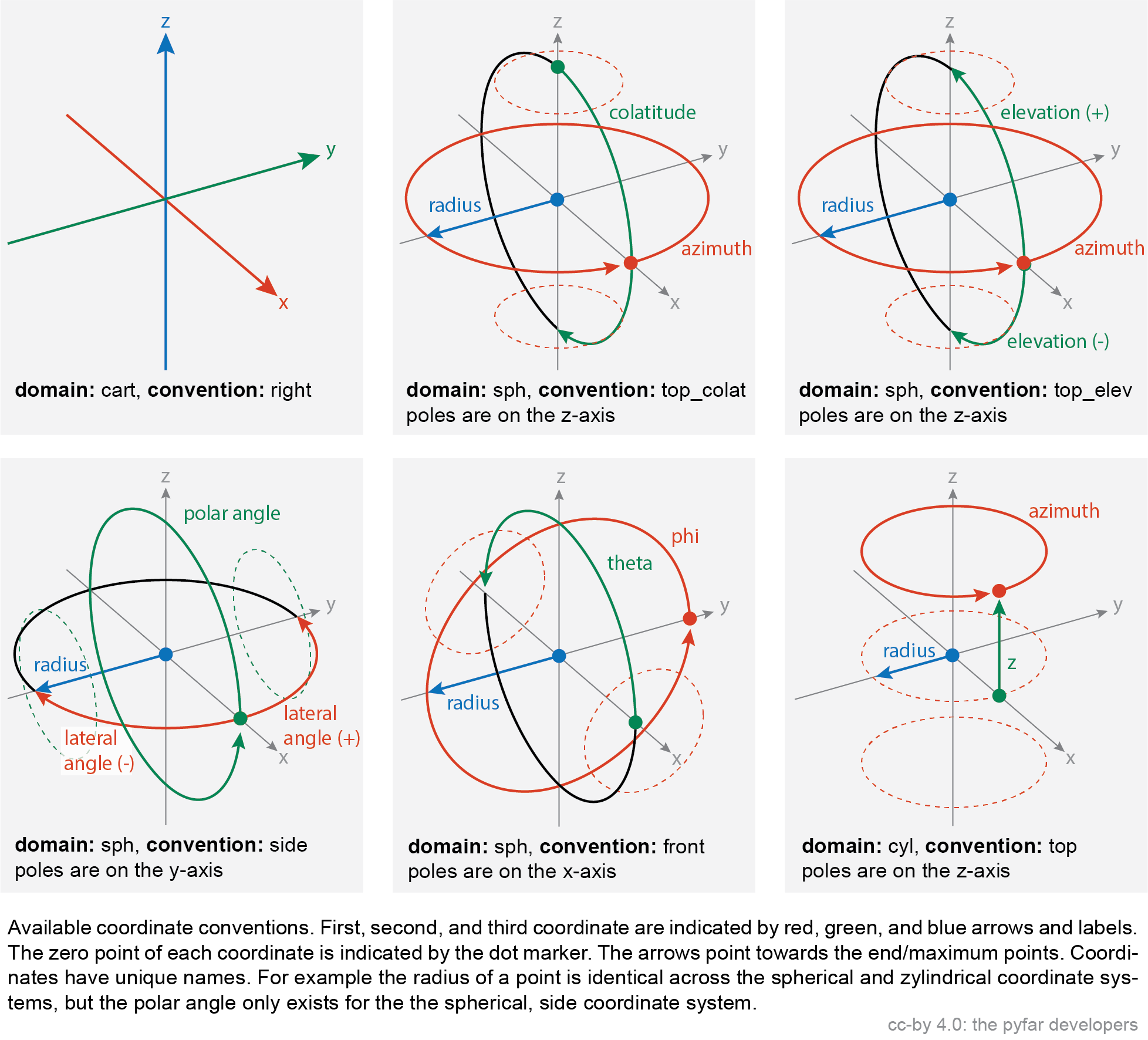
Coordinate systems are defined by their domain (e.g. 'spherical'),
convention (e.g. 'top_elev'), and unit (e.g. 'deg'). A complete
list and description of supported coordinate systems is given in the image
below
and can be obtained by
>>> coords = Coordinates() # get an empty instance of the class
>>> coords.systems() # list all systems
A plethora of sampling schemes to generate coordinate objects is contained in
samplings.
Classes:
|
Container class for storing, converting, rotating, querying, and plotting 3D coordinate systems. |
Functions:
|
Transforms from Cartesian to cylindrical coordinates. |
|
Transforms from Cartesian to spherical coordinates. |
|
Transforms from cylindrical to Cartesian coordinates. |
|
Transforms from spherical to Cartesian coordinates. |
- class pyfar.classes.coordinates.Coordinates(points_1=None, points_2=None, points_3=None, domain='cart', convention=None, unit=None, weights=None, sh_order=None, comment=None)[source]¶
Bases:
objectContainer class for storing, converting, rotating, querying, and plotting 3D coordinate systems.
Methods:
__init__([points_1, points_2, points_3, …])Create
Coordinatesobject with or without coordinate points.copy()Return a deep copy of the Coordinates object.
get_cart([convention, unit, convert])Get coordinate points in cartesian coordinate systems.
get_cyl([convention, unit, convert])Get coordinate points in cylindircal coordinate system.
get_nearest_cart(points_1, points_2, …[, …])Find coordinates within a certain distance in meters to query points.
get_nearest_k(points_1, points_2, points_3)Find the k nearest coordinates points.
get_nearest_sph(points_1, points_2, …[, …])Find coordinates within certain angular distance to the query points.
get_slice(coordinate, unit, value[, tol, …])Get a slice of the coordinates points.
get_sph([convention, unit, convert])Get coordinate points in spherical coordinate systems.
rotate(rotation[, value, degrees, inverse])Rotate points stored in the object around the origin of coordinates.
set_cart(points_1, points_2, points_3[, …])Enter coordinate points in cartesian coordinate systems.
set_cyl(points_1, points_2, points_3[, …])Enter coordinate points in cylindrical coordinate systems.
set_sph(points_1, points_2, points_3[, …])Enter coordinate points in spherical coordinate systems.
show([mask])Show a scatter plot of the coordinate points.
systems([show, brief])Print coordinate systems and their description on the console.
Attributes:
Return channel dimension.
Get comment.
Return channel shape.
Return channel size.
Get the maximum spherical harmonic order.
Get sampling weights.
- __init__(points_1=None, points_2=None, points_3=None, domain='cart', convention=None, unit=None, weights=None, sh_order=None, comment=None)[source]¶
Create
Coordinatesobject with or without coordinate points.The points that enter the Coordinates object are defined by the domain, convention, and unit:
domain, convention
points_1
points_2
points_3
unit
cart, right
x
y
z
met
sph, top_colat
azimuth
colatitude
radius
rad, deg
sph, top_elev
azimuth
elevation
radius
rad, deg
sph, side
lateral
polar
radius
rad, deg
sph, front
phi
theta
radius
rad, deg
cyl, top
azimuth
z
radius_z
rad, deg
For more information run
>>> coords = Coordinates() >>> coords.systems()
- Parameters
points_1 (array like, number) – points for the first coordinate
points_2 (array like, number) – points for the second coordinate
points_3 (array like, number) – points for the third coordinate
domain (string) –
domain of the coordinate system
'cart'Cartesian
'sph'Spherical
'cyl'Cylindrical
The default is
'cart'.convention (string) – coordinate convention (see above) The default is
'right'if domain is'cart','top_colat'if domain is'sph', and'top'if domain is'cyl'.unit (string) – unit of the coordinate system. By default the first available unit is used, which is meters (
'met') fordomain = 'cart'and radians ('rad') in all other cases (See above).weights (array like, number, optional) – sampling weights for the coordinate points. Must have same size as the points points, i.e., if points have five entries, the weights must also have five entries. The default is
None.sh_order (int, optional) – maximum spherical harmonic order of the sampling grid. The default is
None.comment (str, optional) – comment about the stored coordinate points. The default is
None.
- property cdim¶
Return channel dimension.
The channel dimension gives the number of dimensions of the coordinate points excluding the last dimension.
- property comment¶
Get comment.
- property cshape¶
Return channel shape.
The channel shape gives the shape of the coordinate points excluding the last dimension, which is always 3.
- property csize¶
Return channel size.
The channel size gives the number of points stored in the coordinates object.
- get_cart(convention='right', unit='met', convert=False)[source]¶
Get coordinate points in cartesian coordinate systems.
The points that are returned are defined by the domain, convention, and unit:
domain, convention
p[…,1]
p[…,1]
p[…,1]
units
cart, right
x
y
z
met
For more information run
>>> coords = Coordinates() >>> coords.systems()
- Parameters
convention (string, optional) – convention in which the coordinate points are stored. The default is
'right'.unit (string, optional) – unit in which the coordinate points are stored. The default is
'met'.convert (boolean, optional) – if True, the internal representation of the samplings points will be converted to the queried coordinate system. The default is
False, i.e., the internal presentation remains as it is.
- Returns
points – coordinate points.
points[...,0]holds the points for the first coordinate,points[...,1]the points for the second, andpoints[...,2]the points for the third coordinate.- Return type
numpy array
- get_cyl(convention='top', unit='rad', convert=False)[source]¶
Get coordinate points in cylindircal coordinate system.
The points that are returned are defined by the domain, convention, and unit:
domain, convention
p[…,1]
p[…,1]
p[…,1]
units
cyl, top
azimuth
z
radius_z
rad, deg
For more information run
>>> coords = Coordinates() >>> coords.systems()
- Parameters
convention (string, optional) – convention in which the coordinate points are stored. The default is
'right'.unit (string, optional) – unit in which the coordinate points are stored. The default is
'met'.convert (boolean, optional) – if True, the internal representation of the samplings points will be converted to the queried coordinate system. The default is False, i.e., the internal presentation remains as it is.
- Returns
points – coordinate points.
points[...,0]holds the points for the first coordinate,points[...,1]the points for the second, andpoints[...,2]the points for the third coordinate.- Return type
numpy array
- get_nearest_cart(points_1, points_2, points_3, distance, domain='cart', convention='right', unit='met', show=False, atol=1e-15)[source]¶
Find coordinates within a certain distance in meters to query points.
- Parameters
points_i (array like, number) – first, second and third coordinate of the points to which the nearest neighbors are searched.
distance (number) – Euclidean distance in meters in which the nearest points are searched. Must be >= 0.
domain (string, optional) – domain of the points. The default is
'cart'.convention (string, optional) – convention of points. The default is
'right'.unit (string, optional) – unit of the points. The default is
'met'for meters.show (bool, optional) – show a plot of the coordinate points. The default is
False.atol (float, optional) – a tolerance that is added to distance. The default is`` 1e-15``.
- Returns
index (numpy array of ints) – The locations of the neighbors in the getter methods (e.g.,
get_cart). Dimension according to distance (see above). Missing neighbors are indicated withcsize. Also see Notes below.mask (boolean numpy array) – mask that contains
Trueat the positions of the selected points andFalseotherwise. Mask is of shapecshape.
Notes
numpy.spatial.cKDTreeis used for the search, which requires an (N, 3) array. The coordinate points in self are thus reshaped to (csize, 3) before they are passed tocKDTree. The index that is returned refers to the reshaped coordinate points. To access the points for example use>>> points_reshaped = self.get_cart().reshape((self.csize, 3)) >>> points_reshaped[index]
Examples
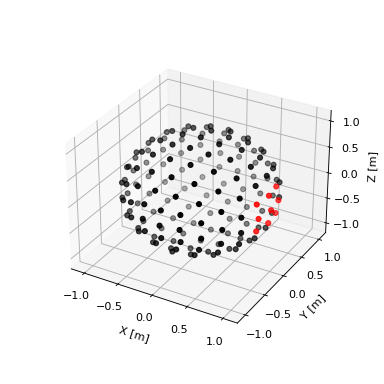
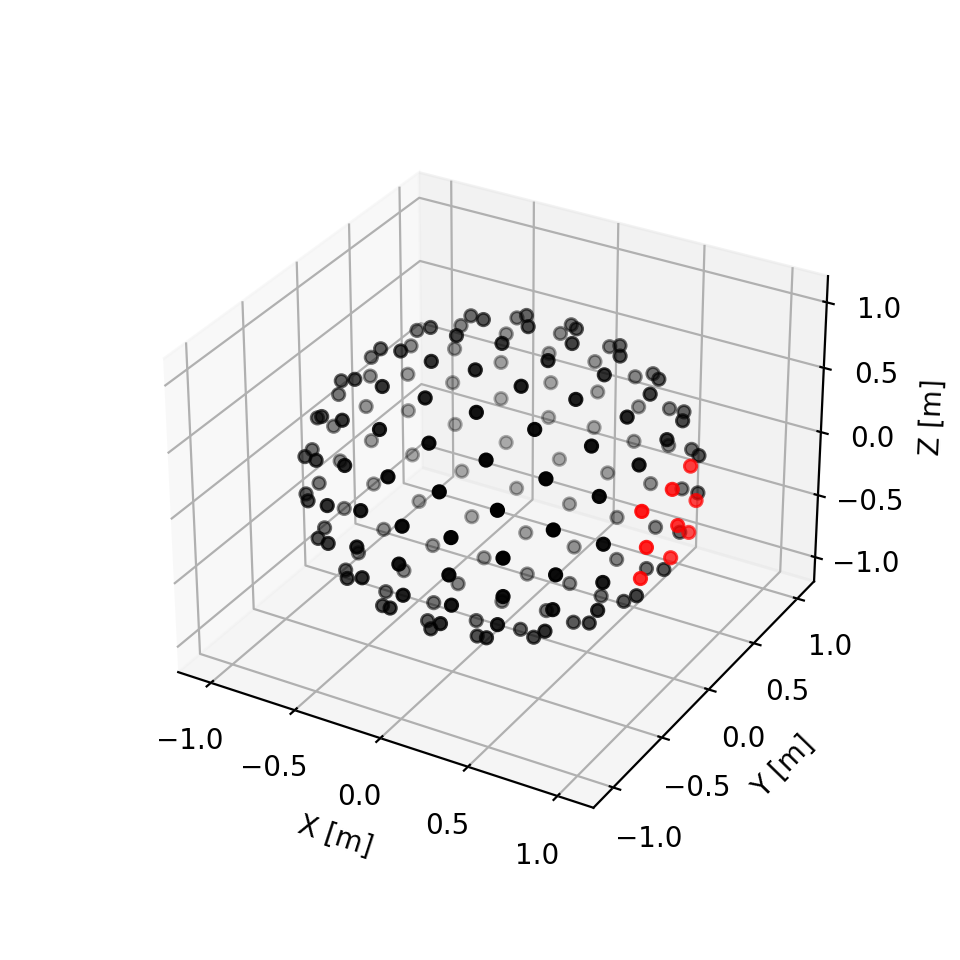
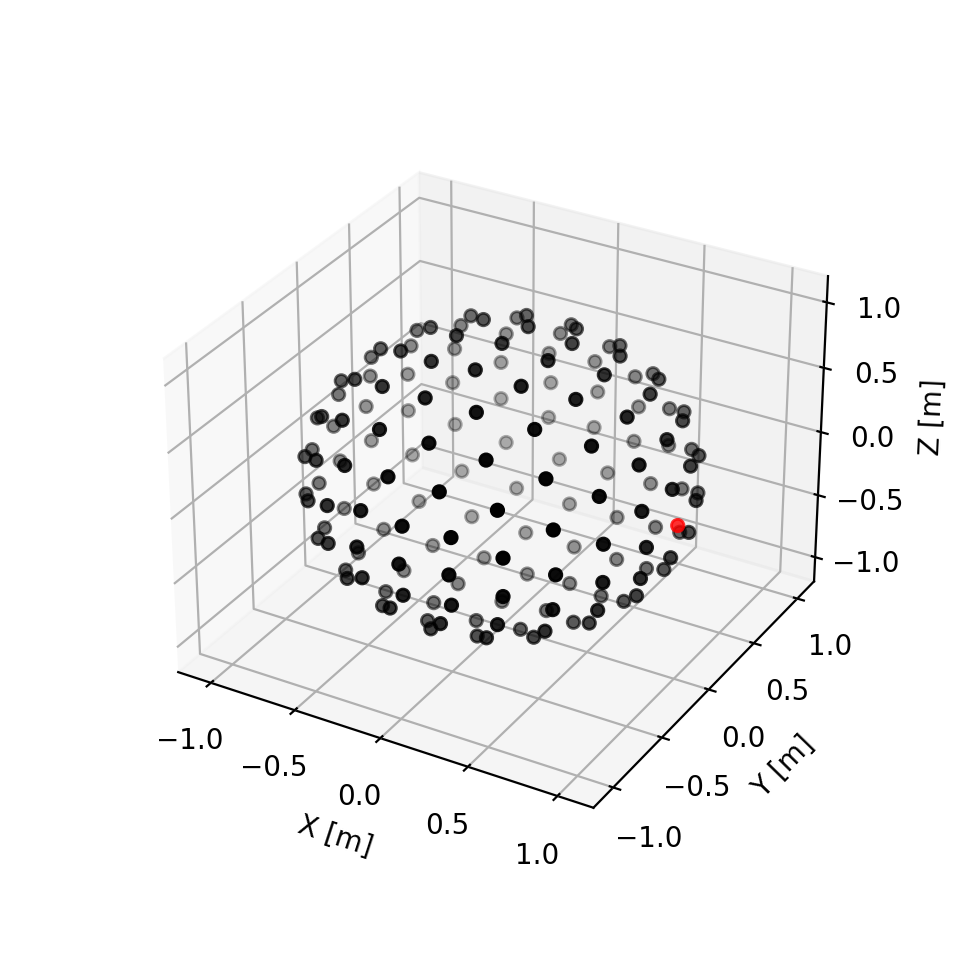
Get frontal points within a distance of 0.5 meters
>>> import pyfar as pf >>> coords = pf.samplings.sph_lebedev(sh_order=10) >>> result = coords.get_nearest_cart(1, 0, 0, 0.5, show=True)
(Source code, png, hires.png, pdf)
- get_nearest_k(points_1, points_2, points_3, k=1, domain='cart', convention='right', unit='met', show=False)[source]¶
Find the k nearest coordinates points.
- Parameters
points_i (array like, number) – first, second and third coordinate of the points to which the nearest neighbors are searched.
k (int, optional) – Number of points to return. k must be > 0. The default is
1.domain (string, optional) – domain of the points. The default is
'cart'.convention (string, optional) – convention of points. The default is
'right'.unit (string, optional) – unit of the points. The default is
'met'for meters.show (bool, optional) – show a plot of the coordinate points. The default is
False.
- Returns
distance (numpy array of floats) – The euclidian distances to the nearest neighbors. If the points have the shape tuple, then the distance has the shape
tuple+(k,). Whenk == 1, the last dimension is squeezed. Missing neighbors are indicated with infinite distances.index (numpy array of ints) – The locations of the neighbors in the getter methods (e.g.,
self.get_cart). Dimension according to distance (see above). Missing neighbors are indicated withcsize. Also see Notes below.mask (boolean numpy array) – mask that contains
Trueat the positions of the selected points andFalseotherwise. Mask is of shapecshape.
Notes
numpy.spatial.cKDTreeis used for the search, which requires an (N, 3) array. The coordinate points in self are thus reshaped to (csize, 3) before they are passed tocKDTree. The index that is returned refers to the reshaped coordinate points. To access the points for example use>>> points_reshaped = self.get_cart().reshape((self.csize, 3)) >>> points_reshaped[index]
Examples
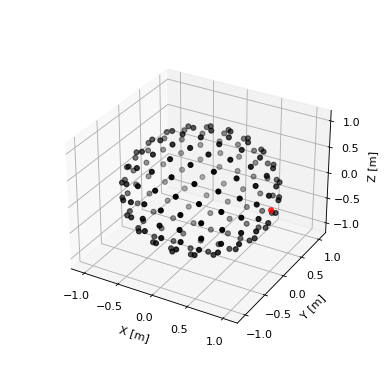
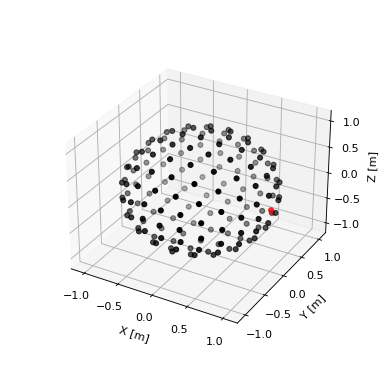
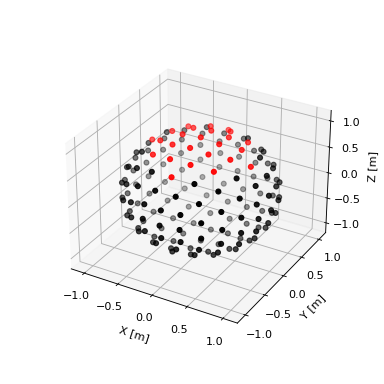
Get frontal point from a spherical coordinate system
>>> import pyfar as pf >>> coords = pf.samplings.sph_lebedev(sh_order=10) >>> result = coords.get_nearest_k(1, 0, 0, show=True)
(Source code, png, hires.png, pdf)
- get_nearest_sph(points_1, points_2, points_3, distance, domain='sph', convention='top_colat', unit='rad', show=False, atol=1e-15)[source]¶
Find coordinates within certain angular distance to the query points.
- Parameters
points_i (array like, number) – first, second and third coordinate of the points to which the nearest neighbors are searched.
distance (number) – Great circle distance in degrees in which the nearest points are searched. Must be >= 0 and <= 180.
domain (string, optional) – domain of the input points. The default is
'sph'.convention (string, optional) – convention of the input points. The default is
'top_colat'.unit (string, optional) – unit of the input points. The default is
'rad'.show (bool, optional) – show a plot of the coordinate points. The default is
False.atol (float, optional) – a tolerance that is added to distance. The default is
1e-15.
- Returns
index (numpy array of ints) – The locations of the neighbors in the getter methods (e.g.,
get_cart). Dimension according to distance (see above). Missing neighbors are indicated withcsize. Also see Notes below.mask (boolean numpy array) – mask that contains
Trueat the positions of the selected points andFalseotherwise. Mask is of shapecshape.
Notes
numpy.spatial.cKDTreeis used for the search, which requires an (N, 3) array. The coordinate points in self are thus reshaped to (csize, 3) before they are passed tocKDTree. The index that is returned refers to the reshaped coordinate points. To access the points for example usepoints_reshaped = points.get_sph().reshape((points.csize, 3))points_reshaped[index]Examples
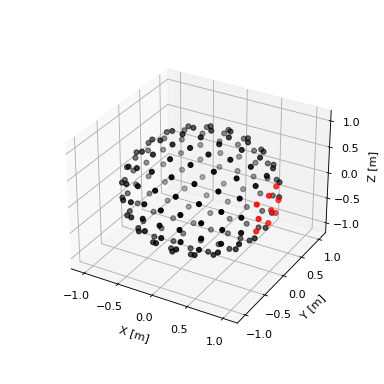
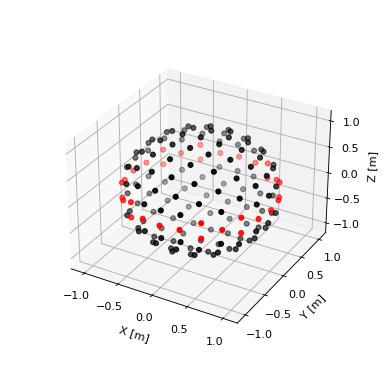
Get top points within a distance of 45 degrees
>>> import pyfar as pf >>> coords = pf.samplings.sph_lebedev(sh_order=10) >>> result = coords.get_nearest_sph(0, 0, 1, 45, show=True)
(Source code, png, hires.png, pdf)
- get_slice(coordinate: str, unit: str, value, tol=0, show=False, atol=1e-15)[source]¶
Get a slice of the coordinates points.
- Parameters
coordinate (str) – coordinate for slicing.
unit (str) – unit in which the value is passed
value (number) – value of the coordinate around which the points are sliced.
tol (number, optional) – tolerance for slicing. Points are sliced within the range
[value-tol, value+tol]. The default is0.show (bool, optional) – show a plot of the coordinate points. The default is
False.atol (number, optional) – a tolerance that is added to tol. The default is
1e-15.
- Returns
mask – mask that contains True at the positions of the selected points and False otherwise. Mask is of shape self.cshape.
- Return type
boolean numpy array
Notes
value must be inside the range of the coordinate (see
.systems). However, value +/- tol may exceed the range.Examples
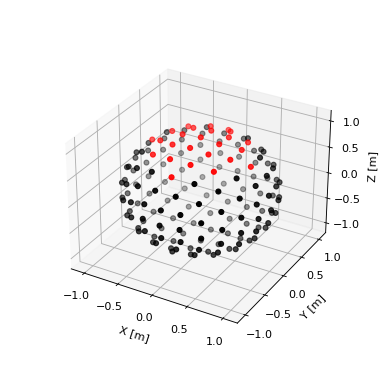
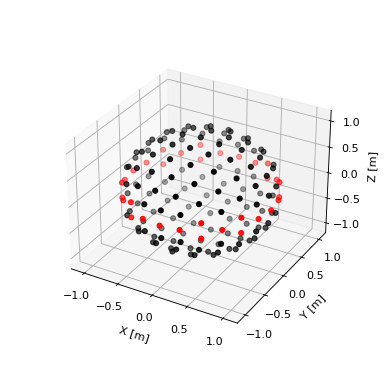
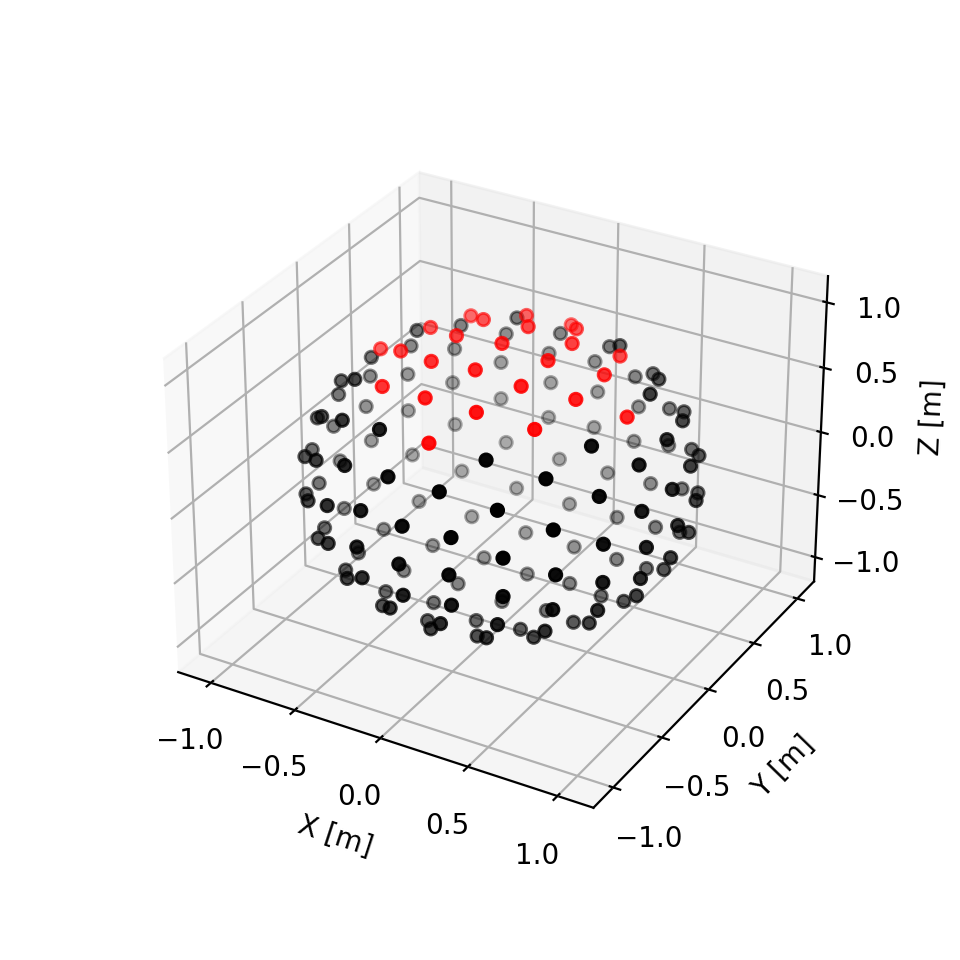
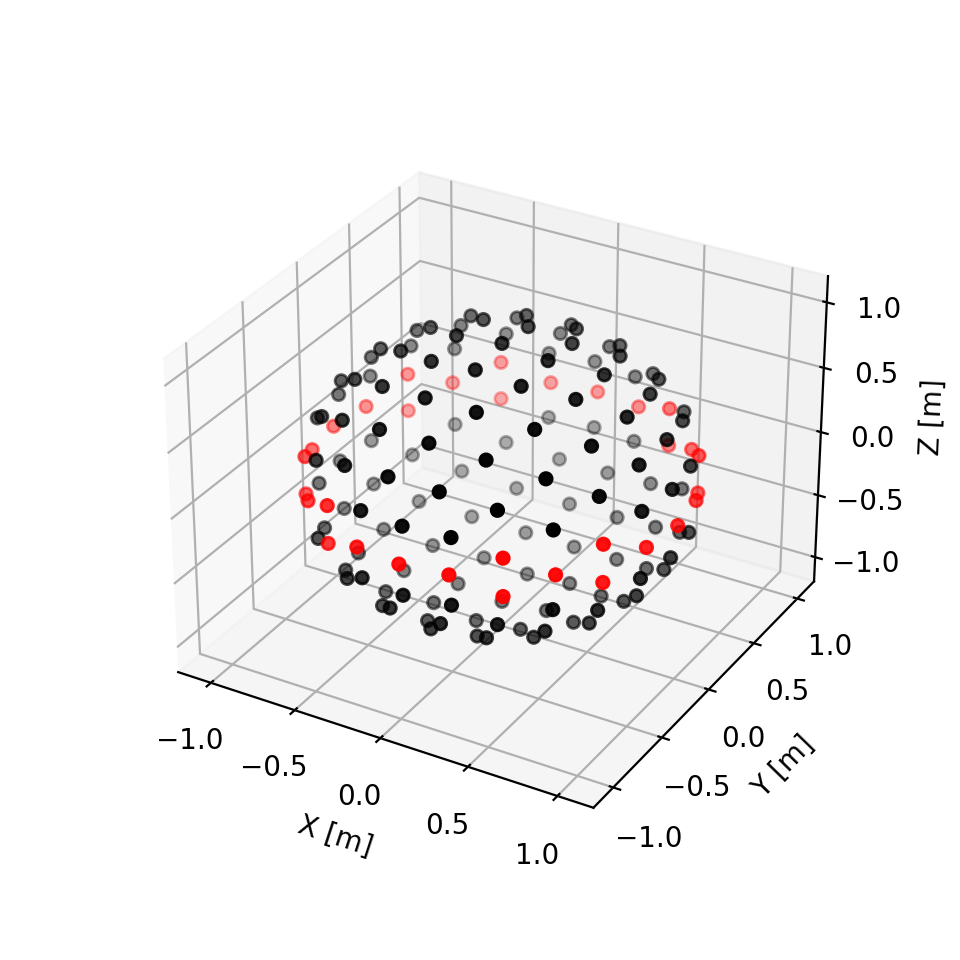
Get horizontal slice of spherical coordinate system within a ring of +/- 10 degrees
>>> import pyfar as pf >>> coords = pf.samplings.sph_lebedev(sh_order=10) >>> result = coords.get_slice('elevation', 'deg', 0, 10, show=True)
(Source code, png, hires.png, pdf)
- get_sph(convention='top_colat', unit='rad', convert=False)[source]¶
Get coordinate points in spherical coordinate systems.
The points that are returned are defined by the domain, convention, and unit:
domain, convention
p[…,1]
p[…,1]
p[…,1]
units
sph, top_colat
azimuth
colatitude
radius
rad, deg
sph, top_elev
azimuth
elevation
radius
rad, deg
sph, side
lateral
polar
radius
rad, deg
sph, front
phi
theta
radius
rad, deg
For more information run
>>> coords = Coordinates() >>> coords.systems()
- Parameters
convention (string, optional) – convention in which the coordinate points are stored. The default is
'top_colat'.unit (string, optional) – unit in which the coordinate points are stored. The default is
'rad'.convert (boolean, optional) – if True, the internal representation of the samplings points will be converted to the queried coordinate system. The default is
False, i.e., the internal presentation remains as it is.
- Returns
points – coordinate points.
points[...,0]holds the points for the first coordinate,points[...,1]the points for the second, andpoints[...,2]the points for the third coordinate.- Return type
numpy array
- rotate(rotation: str, value=None, degrees=True, inverse=False)[source]¶
Rotate points stored in the object around the origin of coordinates.
This is a wrapper for
scipy.spatial.transform.Rotation(see this class for more detailed information).- Parameters
rotation (str) –
'quat'rotation given by quaternions.
'matrix'rotation given by matrixes.
'rotvec'rotation using rotation vectors.
'xyz'rotation using euler angles. Up to three letters. E.g.,
'x'will rotate about the x-axis only, while'xz'will rotate about the x-axis and then about the z-axis. Use lower letters for extrinsic rotations (rotations about the axes of the original coordinate system xyz, which remains motionless) and upper letters for intrinsic rotations (rotations about the axes of the rotating coordinate system XYZ, solidary with the moving body, which changes its orientation after each elemental rotation).
value (number, array like) – amount of rotation in the format specified by rotation (see above).
degrees (bool, optional) – pass angles in degrees if using
'rotvec'or euler angles ('xyz'). The default isTrue. Use False to pass angles in radians.inverse (bool, optional) – Apply inverse rotation. The default is
False.
Notes
Points are converted to the cartesian right handed coordinate system for the rotation.
Examples
Get a coordinates object
>>> import pyfar as pf >>> coordinates = pf.samplings.sph_gaussian(sh_order=3)
Rotate 45 degrees about the y-axis using
quaternions
>>> coordinates.rotate('quat', [0 , 0.38268343, 0 , 0.92387953])
a rotation matrix
>>> coordinates.rotate('matrix', ... [[ 0.70710678, 0 , 0.70710678], ... [ 0 , 1 , 0. ], ... [-0.70710678, 0 , 0.70710678]])
a rotation vector
>>> coordinates.rotate('rotvec', [0, 45, 0])
euler angles
>>> coordinates.rotate('XYZ', [0, 45, 0])
To see the result of the rotation use
>>> coordinates.show()
- set_cart(points_1, points_2, points_3, convention='right', unit='met')[source]¶
Enter coordinate points in cartesian coordinate systems.
The points that enter the Coordinates object are defined by the domain, convention, and unit
domain, convention
points_1
points_2
points_3
unit
cart, right
x
y
z
met
For more information run
>>> coords = Coordinates() >>> coords.systems()
- Parameters
points_i (array like, number) – points for the first, second, and third coordinate
convention (string, optional) – convention in which the coordinate points are stored. The default is
'right'.unit (string, optional) – unit in which the coordinate points are stored. The default is
'met'for meters.
- set_cyl(points_1, points_2, points_3, convention='top', unit='rad')[source]¶
Enter coordinate points in cylindrical coordinate systems.
The points that enter the Coordinates object are defined by the domain, convention, and unit
domain, convention
points_1
points_2
points_3
unit
cyl, top
azimuth
z
radius_z
rad, deg
For more information run
>>> coords = Coordinates() >>> coords.systems()
- Parameters
points_i (array like, number) – points for the first, second, and third coordinate
convention (string, optional) – convention in which the coordinate points are stored. The default is
'top'.unit (string, optional) – unit in which the coordinate points are stored. The default is
'rad'.
- set_sph(points_1, points_2, points_3, convention='top_colat', unit='rad')[source]¶
Enter coordinate points in spherical coordinate systems.
The points that enter the Coordinates object are defined by the domain, convention, and unit
domain, convention
points_1
points_2
points_3
unit
sph, top_colat
azimuth
colatitude
radius
rad, deg
sph, top_elev
azimuth
elevation
radius
rad, deg
sph, side
lateral
polar
radius
rad, deg
sph, front
phi
theta
radius
rad, deg
For more information run
>>> coords = Coordinates() >>> coords.systems()
- Parameters
points_i (array like, number) – points for the first, second, and third coordinate
convention (string, optional) – convention in which the coordinate points are stored. The default is
'top_colat'.unit (string, optional) – unit in which the coordinate points are stored. The default is
'rad'.
- property sh_order¶
Get the maximum spherical harmonic order.
- show(mask=None, **kwargs)[source]¶
Show a scatter plot of the coordinate points.
- Parameters
mask (boolean numpy array, None, optional) – Plot points in red if
mask==Trueand black elsewhere. The default isNone, which the same color for all points.kwargs (optional) – keyword arguments are passed to
matplotlib.pyplot.scatter(). If a mask is provided and the key c is contained in kwargs, it will be overwritten.
- Returns
ax – The axis used for the plot.
- Return type
matplotlib.axes._subplots.Axes3DSubplot
- systems(show='all', brief=False)[source]¶
Print coordinate systems and their description on the console.
Note
All coordinate systems are described with respect to the right handed cartesian system (
domain='cart',convention='right'). Distances are always specified in meters, while angles can be radians or degrees (unit='rad'orunit='deg').- Parameters
show (string, optional) –
'current'to list the current corrdinate system or'all'to list all coordinate systems. The default is'all'.brief (boolean, optional) – Will only list the domains, conventions and units if True. The default is
False.
- Returns
- Return type
Prints to console.
- property weights¶
Get sampling weights.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
- pyfar.classes.coordinates.cart2cyl(x, y, z)[source]¶
Transforms from Cartesian to cylindrical coordinates.
Cylindrical coordinates follow the convention that the azimuth is 0 at positive x-direction and pi/2 at positive y-direction (counter clockwise rotation). The height is identical to the z-coordinate and the radius is measured orthogonal from the z-axis.
Cartesian coordinates follow the right hand rule.

- Parameters
x (numpy array, number) – x values
y (numpy array, number) – y values
z (numpy array, number) – z values
- Returns
azimuth (numpy array, number) – azimuth values
height (numpy array, number) – height values
radius (numpy array, number) – radii
Notes
To ensure proper handling of the azimuth angle, the
arctan2implementation from numpy is used.
- pyfar.classes.coordinates.cart2sph(x, y, z)[source]¶
Transforms from Cartesian to spherical coordinates.
Spherical coordinates follow the common convention in Physics/Mathematics. The colatitude is measured downwards from the z-axis and is 0 at the North Pole and pi at the South Pole. The azimuth is 0 at positive x-direction and pi/2 at positive y-direction (counter clockwise rotation).
Cartesian coordinates follow the right hand rule.
- Parameters
x (numpy array, number) – x values
y (numpy array, number) – y values
z (numpy array, number) – z values
- Returns
azimuth (numpy array, number) – azimuth values
colatitude (numpy array, number) – colatitude values
radius (numpy array, number) – radii
Notes
To ensure proper handling of the azimuth angle, the
arctan2implementation from numpy is used.
- pyfar.classes.coordinates.cyl2cart(azimuth, height, radius)[source]¶
Transforms from cylindrical to Cartesian coordinates.
Cylindrical coordinates follow the convention that the azimuth is 0 at positive x-direction and pi/2 at positive y-direction (counter clockwise rotation). The height is identical to the z-coordinate and the radius is measured orthogonal from the z-axis.
Cartesian coordinates follow the right hand rule.
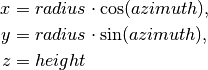
- Parameters
azimuth (numpy array, number) – azimuth values
height (numpy array, number) – height values
radius (numpy array, number) – radii
- Returns
x (numpy array, number) – x values
y (numpy array, number) – y values
z (numpy array, number) – z values
Notes
To ensure proper handling of the azimuth angle, the
arctan2implementation from numpy is used.
- pyfar.classes.coordinates.sph2cart(azimuth, colatitude, radius)[source]¶
Transforms from spherical to Cartesian coordinates.
Spherical coordinates follow the common convention in Physics/Mathematics. The colatitude is measured downwards from the z-axis and is 0 at the North Pole and pi at the South Pole. The azimuth is 0 at positive x-direction and pi/2 at positive y-direction (counter clockwise rotation).
Cartesian coordinates follow the right hand rule.
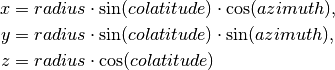
- Parameters
azimuth (numpy array, number) – azimuth values
colatitude (numpy array, number) – colatitude values
radius (numpy array, number) – radii
- Returns
x (numpy array, number) – x values
y (numpy array, number) – y values
z (numpy array, number) – z vales